

上海(hǎi)機(jī)械手如何清理灰塵?
文章出處(chù):本站 人氣:11115 發表時間:2022-05-16 09:13:50
機械手作為(wéi)戰略新興產業的重要內容,這(zhè)種具有前瞻性、戰略性的高技術領域,加速了國內(nèi)製造業的危機(jī)感。工業(yè)衝(chōng)壓機器人關鍵應用(yòng)在於運動(dòng)控(kòng)製,而運動控製則是保證機床精度的一個重(chóng)要因素。
機械手是(shì)通過計算機的控製的,能大大增加機械(xiè)手(shǒu)的準確度,減少誤差率(lǜ),保證生產的產品的質量的穩定性。衝(chōng)床機械手壓力(lì)機控製係統的集成(chéng)化可通過(guò)單一操作接口實現所有壓(yā)機和模具的各項控製功能,包括故障診斷、模(mó)具菜單配置、可編程限位開關和模具監控及調整等,並使設備的維修保養更加方便,而(ér)且明(míng)顯增加壓力機的有效(xiào)工作時(shí)間(jiān)。
另外,機械手具有現場通信網(wǎng)絡、現場設備互聯、互動操作性、分(fèn)散功能模塊、開放式功能的現場(chǎng)總線技術(shù)是(shì)壓力機控製技術的發展方向,對實現(xiàn)自動化具有(yǒu)明顯推動作用。 機械(xiè)手可以(yǐ)代(dài)替工人進行繁重或者(zhě)危險的生產工(gōng)序,所以機(jī)械(xiè)手廣泛(fàn)應用於機械製造、冶金、電子、輕工和原子能等生產領域。但為了能有更好的銷售市(shì)場,提高產品的(de)智能(néng)化水平已經迫在眉睫,才能發(fā)揮更大的空間。
特別是今(jīn)年來的發展快速,機械手為適應柔性化的生產要求,壓力機的(de)所有控製功(gōng)能都做(zuò)到集成化,從而實現全(quán)套模具的菜單化管理,主要包括(kuò)滑塊行程調整、平衡器氣壓的調整、氣墊行程(chéng)調(diào)整(zhěng)以及自動化控製係統等各個環節的參數設定。因此,選擇(zé)準確度,工作效率高的機械手是每個五金衝壓行業都需要應用到,才能給企業帶去更大的效益,保(bǎo)證質量可靠,同時能與客戶建立長久的合作關係,效益最大化的實現。

機械(xiè)手手臂的組成:
(1)運動元件。如油缸、氣缸、齒條、凸輪等是驅動手臂運動的部件。
(2)導向裝置。是保證手臂的正確方麵(miàn)及承受由於工件的重量所產生的彎曲和扭(niǔ)轉的力矩。
(3)手臂。起著連接和承受外力的作用。手臂上的零部(bù)件,如油缸、導向杆、控製(zhì)件(jiàn)等(děng)都安裝在手臂上。
此外,根據機械手運動(dòng)和工作的要求,如(rú)管路、冷卻裝置、行程定位裝置和(hé)自動檢測裝置等,一般也都裝在手(shǒu)臂上。所以手臂的結構、工作範圍、承載能(néng)力和(hé)動作精度都直接影響機械手的工作性能。

機械手主要由執行機構、驅動機構和(hé)控製係統三(sān)大部分組成(chéng)。
那(nà)你知(zhī)道它的驅動機(jī)構有那些嗎,我們來看看。他們都是有那些作用呢。
機械手的執行機構分為手(shǒu)部、手臂、軀幹;
3、軀幹軀(qū)幹是安裝手臂、動力源和各種執行機(jī)構的支架。
1、手部:手部安裝在手臂的前端。手臂的內孔中裝有傳動軸,可把運用傳給(gěi)手腕,以轉動、伸曲手腕、開閉手指。
機械手手部的構(gòu)造係模仿人的手指,分為無關節、固定關(guān)節和自(zì)由關節3種。手指的數量又可分為二指、三指、四指等,其(qí)中以二指用的最多。
可根(gēn)據夾持對象的形狀和大小配備多種形狀和大小的夾頭以適應操作的需(xū)要。所謂沒有手指的手部,一般都是(shì)指真空吸盤或(huò)磁性吸盤。
2、手臂:手臂的作用是引導手指準確地抓住工(gōng)件,並(bìng)運送到(dào)所需的位置上。
為了使機械手能夠正確地工(gōng)作,手臂(bì)的3個自由度都要精確地定位。
機(jī)械手控製的要素包括工作(zuò)順序、到達位置、動作時間、運動速度、加減速度等。機械(xiè)手的控(kòng)製分為點位控製和連續軌跡控製兩種。
控製係統可(kě)根據(jù)動作的要求,機(jī)械(xiè)手設計采(cǎi)用(yòng)數字(zì)順序(xù)控製。它首先要編製程序(xù)加以存儲,然後再根據規定的程序,控製機械手進行工作程序的存(cún)儲方式(shì)有分離存儲(chǔ)和集中存儲兩種。
分離存儲(chǔ)是將各種控(kòng)製因素(sù)的信息分(fèn)別(bié)存儲於兩種以(yǐ)上的存儲裝置中,如順序信息存儲於插銷板、凸輪轉鼓、穿孔帶內;位(wèi)置信息存儲於時間繼電器、定速回轉鼓等;集中存儲是將(jiāng)各種控製因素的信(xìn)息全部(bù)存儲於一種存儲裝置內,如(rú)磁帶、磁(cí)鼓等。
這(zhè)種方式使用於順序、位置、時間、速度(dù)等必須同時控(kòng)製的場合,即連續控製的(de)情況(kuàng)下使用。
機(jī)械手的日常維護(hù)保養。
1、各部位螺絲,銜接緊固件有無鬆脫
由於長期持續作業,各(gè)部位螺絲、銜接(jiē)緊固件的鬆脫是導(dǎo)致(zhì)機(jī)械手和成型機模具破損的原因。
a.臂上升(shēng)/下降,引入/引退,橫(héng)行及旋出、旋入等固定部位(wèi)的螺絲,螺母是否(fǒu)鬆脫
b.上下行程及引入行程調整用的擋板,防落器托架的固(gù)定螺絲是否鬆(sōng)脫。
c.機體單元(yuán)和控製箱間的機箱內的端子是否(fǒu)鬆脫.(誤動作原因)
2、氣壓回路與各部位銜接線的查看(kàn)
a.氣管的(de)扭折損害會影響氣壓的恰當流量.
b.對進氣(qì)過濾器內的積水及油汙(wū)進行清洗.
c.各氣管接頭或氣管有無漏氣現象.(形成氣壓(yā)不足)
d.信號銜接線的損害會導致機械手發生誤動作或漏電(diàn)現象(xiàng).
3、機械手動作測(cè)驗及限位檢測信號的承認查看
a.定時測驗機(jī)械手配件及各動作是否有反常現象(xiàng)。如:動作時異響
b.查看機械手(shǒu)信號及各限位檢測開關信號,在(zài)機械手動作時,輸入,輸出的檢測信(xìn)號有無閃耀現象。
c.檢查各限位檢測開關是否有因機械手長期作業而引起的方位移(yí)位改變,形成機械手限位檢測信號的不(bú)良現象。
4、各導軌外表汙(wū)垢的鏟除及各移動部份的定時給油
a.下行,前後和橫行用導軌外表上的黃油或廢物附著所形成(chéng)的汙垢進行定時清理。
b.對機械手各移動部份及(jí)機械軸承,滑塊等部件進行定時給油及加注黃油。

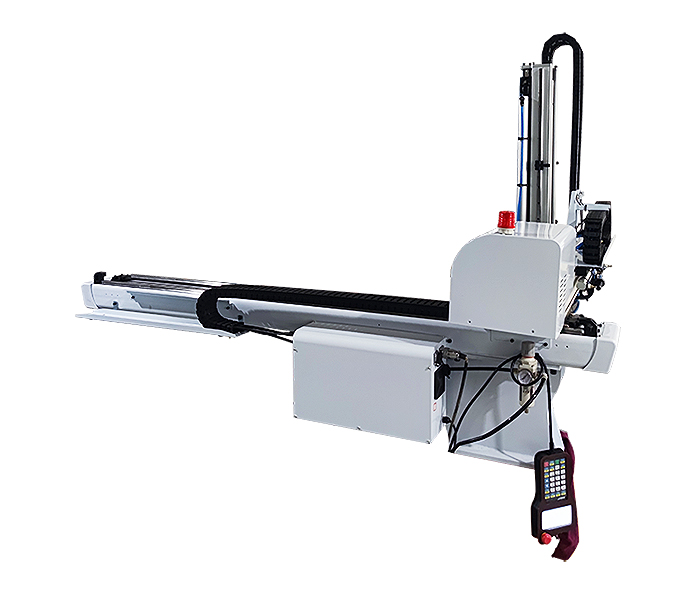
機械手的特點:
1、安裝簡單:立柱式結構,可連接(jiē)齒輪衝(chōng)床、氣動衝床及各種油壓機;
2、全麵滿足衝床自動上下料需求(qiú):可根據衝床高度、送料高度、下料高度自動適應;
3、傻瓜式操作:衝壓自動化機械手采用示教模式規劃運動軌跡,簡(jiǎn)單易用;
4、量(liàng)身訂製解(jiě)決方案:依客戶的個性化需求,量身訂製較好解決方案,避免客(kè)戶錯誤的設備投資;
5、應用(yòng)廣泛:噸(dūn)位衝床、各種高度的機台均可使用,多(duō)角度實現各種複雜衝壓動作,如翻轉、打廢料、側掛或斜放、堆(duī)料等。
- 上一篇: 昆山助力(lì)機械手工作效(xiào)率如何?
- 下一篇: 安徽衝床機械手工作效率如何?




