

嘉善吸盤(pán)機械手如何進(jìn)行更好的係統控(kòng)製(zhì)?
文章出處:本站 人氣(qì):9829 發表時間:2022-08-16 13:20:32
吸盤(pán)機械手的手部是用來直接抓取注塑製(zhì)品的部件。由於注塑製品的形狀,大小,重量(liàng)及表麵特征等方麵存(cún)在著差異(yì),因此吸盤機械手的手部有多種形式,一般可分為(wéi)夾持式和吸附式兩種。夾持式手(shǒu)部的主要形式為夾鉗式,常用於抓(zhuā)取不易破碎或變形的製品(pǐn),它對所抓取(qǔ)的製品的形狀有較大的適應性。夾持式手部由(yóu)手指,傳動機構和驅動裝置組成。
對於夾持式手部,進(jìn)行吸盤機械手設計選用(yòng)時主要考慮(lǜ)以(yǐ)下幾點。
(1)手部應具有適應的夾緊(jǐn)力(lì)和驅動。
(2)手指應具有(yǒu)足夠的(de)開關範圍。
(3)手(shǒu)指對製品應具有一定的夾(jiá)持(chí)精度。
(4)手部對製品應具有一定的適應能力,且要求手(shǒu)部能耐受注塑製品剛從模腔中(zhōng)取出時的高溫及腐蝕性。
運用(yòng)吸(xī)盤(pán)機械手做(zuò)出(chū)來的產品質量怎麽樣(yàng)?
1、如成型機為自動脫模,掉落時會產品刮傷,沾到油汙而產生不良品(pǐn)。
2、如人取出產品有四點問題存在:a、有可能手會刮傷產品,b、有(yǒu)可能手不幹淨而弄髒產品,c、如多穴漏取而壓壞(huài)模具。d、因人(rén)員(yuán)疲勞而影響周期,降低生產效率。
3、用吸盤機械手使(shǐ)用輸送帶,生產包裝人員更可以一心一意嚴把品質關,不會因拿產品而分(fèn)心(xīn)或是離注塑機太近,太熱而影響工作,從而降低生產效率。
4、人員取產品時間不固定,會造成產(chǎn)品縮水、變型(料管若過火,需(xū)重新注塑造成原料浪(làng)費,目前(qián)原料價格高漲),吸盤機(jī)械手取出時間固定,確保產品(pǐn)品質。
5、人員取產品需先閉安全門,會(huì)造成成型機壽命減短或損壞,影響生產。使用吸盤機械手可保證注塑品(pǐn)質和延(yán)長成型機壽(shòu)命。

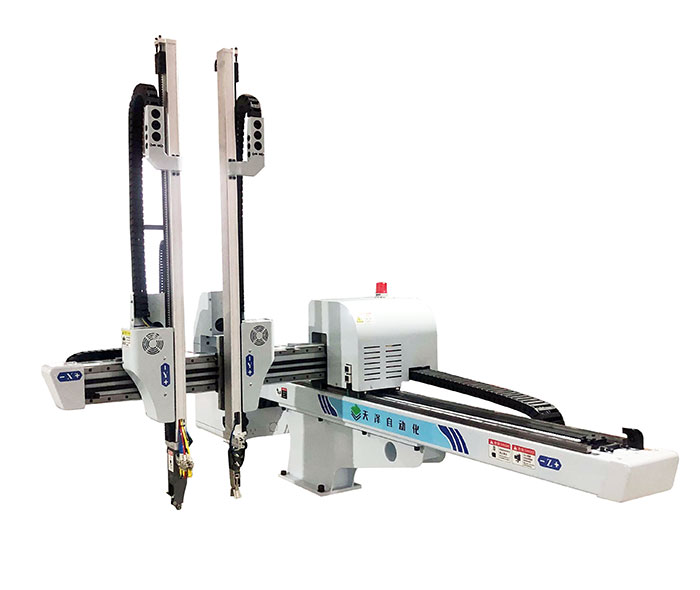
吸盤機械手主要由執行機構、驅動機構和控(kòng)製係統三大部分組成。
那你知道它的驅動(dòng)機構有(yǒu)那些(xiē)嗎,我們來看看。他們都是有那些作用呢。
吸盤機械手的執行機構分為(wéi)手部、手臂、軀幹;
3、軀幹軀幹是安裝(zhuāng)手臂、動力源和各種(zhǒng)執行機構的支架。
1、手部:手部安裝在手臂的前端。手(shǒu)臂的內孔中裝有傳(chuán)動軸,可(kě)把運用傳給手腕(wàn),以轉動、伸曲手腕、開閉(bì)手(shǒu)指。
吸盤機械手手部的構造(zào)係模仿(fǎng)人的手指,分(fèn)為無關節、固定關節和自(zì)由關節3種(zhǒng)。手指的數量又可分為二指、三指、四指等,其中以二(èr)指(zhǐ)用的最多。
可(kě)根據(jù)夾持對(duì)象的形狀和大小配備多種形狀和大小的夾頭以(yǐ)適應操作的需要。所謂沒有手指的手部,一般都是指真空吸盤或磁性吸盤。
2、手(shǒu)臂:手臂的作用是引導手指準確地抓住工件,並運送到所需(xū)的位置上。
為了使吸盤機械手能夠正確地工作(zuò),手臂的3個自由度都要精確地定位。
吸盤機械手控製的要素包括(kuò)工作順序、到達位置、動作時間、運動速度、加(jiā)減速度等。吸盤機械手的(de)控(kòng)製分(fèn)為點位控製和(hé)連(lián)續軌跡控製兩種。
控製係統可根據動作的要求,吸盤機械(xiè)手設計采用數字順序控製。它首(shǒu)先要編製程序加以存儲,然後再根據規定的程序,控(kòng)製吸盤機械手進行工作程序的存儲方(fāng)式有分離存儲和集中存儲兩種。
分離存儲是將各(gè)種控製(zhì)因素的信息分別存儲於兩種以上的存儲(chǔ)裝置中,如順序信息存儲於插銷板、凸輪轉鼓、穿孔帶內;位(wèi)置(zhì)信(xìn)息存儲(chǔ)於時間繼電器、定速回轉鼓等;集中存儲是將各種控製因素的信息全部存儲於一種存(cún)儲裝置內,如磁(cí)帶、磁(cí)鼓(gǔ)等。
這種方式使用於順序、位置(zhì)、時間、速(sù)度等必須同時控製的場(chǎng)合,即連續控製的情況下使用。

吸盤機械手的優勢有哪些?
1.安全性高.運用人手進到模內(nèi)取產品,假如機器毛病或誤按鍵形成合模,有夾傷工人手之(zhī)風險,運用吸盤(pán)機械手確保安全。
2.節約人工. 吸盤機械手取出產品放置在輸送帶(dài)或承接台上,隻需一人同(tóng)時看兩(liǎng)台乃至更多台,可節約人工,做成主動流水線更能節約廠(chǎng)地,所以(yǐ)整(zhěng)廠規劃(huá)更小更緊湊精致。
3.進步功率和質量.
4.延(yán)伸機(jī)器的運用壽(shòu)數.人員取出產品需求頻頻的開關安(ān)全門,會形成(chéng)機床某些部件(jiàn)壽數(shù)減短乃至損壞,影響出產。運用吸盤機械(xiè)手則不需求頻(pín)頻的開關安全門(mén)。
5.下降產(chǎn)品不良率.剛成型產品還有(yǒu)未完結冷卻,存在(zài)餘溫。人手取出會形成手痕且人工取(qǔ)出用(yòng)力不均取出產品存在不均的變型。吸(xī)盤機械(xiè)手選用無紋吸具抱具(jù)用力均勻使之產質量量大有提(tí)升。
6.防止加工產(chǎn)品損壞.人員有(yǒu)時會忘了取出產品(pǐn),合(hé)模會形(xíng)成模具損壞,吸盤機械手若未取出產品,會主動報警停機,肯定不會傷到(dào)模具。
7.節約質料,下降成本.人員取出(chū)時刻不定,會形成產(chǎn)品縮水、變型,因吸盤(pán)機械手取出時刻固定,所以質量安穩。
8.節約人工(gōng).運用吸盤機械手,水口與產品可主動分開放置,不需求再選擇,可節約人工

你知道(dào)吸盤機械手的關節是靠什麽(me)連接的?
不論是3軸還是6軸的吸盤機械手,采用的都是交流伺服電機,並且都(dōu)是帶刹車的。
編碼器一般都是絕對值的。不是絕(jué)對(duì)值的電機,每次停機後存在一個回零的(de)問題(tí)。
吸盤機械手都要用到減速器
早期進口的ABB的吸盤機械手大都用(yòng)他們(men)自己(jǐ)製造的齒輪機構減速。
6軸工業機器人的1、2、3軸用的都是RV減速機(jī),屬於擺線針輪結構。4、5、6軸一般(bān)采用諧波減速機。由於軸承(chéng)是特製(zhì)的,這種擺線針輪的RV減速機軸向尺寸很短。國內用的比(bǐ)較多的是日本人帝人公司的這種(zhǒng)減速機。軸向尺寸比較短的(de)伺服電機有日本的發那(nà)科,國內廣州數控也有專門為他們(men)自己公司工業機器人配(pèi)套的伺服電機,較他們傳統的伺服電機軸(zhóu)向(xiàng)尺寸短很多。
- 上(shàng)一篇: 嘉善碼垛(duǒ)機械手(shǒu)作用有哪(nǎ)些?
- 下一篇: 安徽濕噴機械(xiè)手如何進行更好的係統控製(zhì)?




