

合肥伺服機(jī)械手如何清理灰塵?
文章出處:本站 人氣:11399 發表(biǎo)時間:2022-05-16 09:43:17
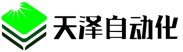
伺服機(jī)械手(shǒu)操作流程是怎樣的?
1、先接好氣管,讓機械手氣壓表的氣壓在4kg-8kg之間。
2 、打開機械(xiè)手電源開關(guān),並(bìng)在注塑機控製板上打開機械手功能鍵。
3 、注塑機開模(mó)完(wán)成(chéng)後,先手動放(fàng)下機械手臂,並(bìng)調節好(hǎo)手臂(bì)下降的位置(zhì)。在調試機械手的各行程位置時,首先模開(kāi)到足夠寬(kuān)的位置,再把機械手氣(qì)缸裏的氣放掉,用手慢(màn)慢地托下主臂,再(zài)逐一進行調試(shì),以免伺服機械手下降時損壞(huài)模具及治具。
4 、按“手動”鍵,即可進入手動操作畫麵,依所須動作(zuò),先按“選擇”鍵,再 按“動作”鍵(jiàn),依次調節好各動作的延時時間,檢查安全報警(jǐng)裝置,機械手取(qǔ)出異常時能否發生報警,開機之前必須調好檢測,以免壓模 。
5、按產品的要求(qiú)設定或選擇所(suǒ)需要的程式合理進(jìn)行取物, 然後在注塑機(jī)自動狀態下,按“全自動”鍵即(jí)可進入自動生產。
6、如要修改動作程式:按“停止”鍵和“修改”鍵,進入程式修改畫麵。
7、技術人員可依據不同的模具(jù),輸入動作程式“0-99”,確定後按“輸入(rù)”鍵 確認,再按“停止”鍵,然後按“全(quán)自動”鍵進入(rù)自(zì)動生產。
8、其它設定參照設備使用說明書。

如何降低伺服機械手的生產誤(wù)差
現在很多機械生產廠家,都(dōu)在選擇用伺服機(jī)械手作為主要生(shēng)產方式,但在生產中(zhōng)使用自動化機械(xiè)手能夠提高產品的生產效率和產品質量以及在降低(dī)產品的生產成本都大有提高,在生產中伺服機械手(shǒu)能否準確地工作,實際上是一(yī)個三維(wéi)空間的定位問題,是若幹線量和角量定位的組合。在許多較簡單情(qíng)況下,單個量值可能是主要的。影響單(dān)個線量或角量定位誤差的因素如下:
1.定位方式——不同的定位(wèi)方式影響因素不(bú)同。如機械擋(dǎng)塊定位時,定位(wèi)精度與擋塊的剛度和碰接擋塊時的速度等因素有關。
2.定位速度——定(dìng)位(wèi)速度對定位精度影響很(hěn)大。這是因為定位速度不(bú)同時,必須(xū)耗散的運動部件的能量不(bú)同。通常,為減小伺服機械手定位(wèi)誤差應合理控製定位速度,如提高緩衝裝置的緩衝性能和緩衝效率,控製驅動係統使運動部件適時減速。
3.精度——機械手的製造精度和安裝(zhuāng)調速精度對(duì)定位精度有直接影(yǐng)響。
4.剛度——機械手(shǒu)本身(shēn)的(de)結構剛度和接觸剛度低時,因易產生振動,定位精度一般較(jiào)低。
5.運動件的重量——運動件的重量包括機械手本身的重量和被抓(zhuā)物的重量。 運動件重(chóng)量的變(biàn)化(huà)對(duì)定(dìng)位精度影響較(jiào)大。通常,運動(dòng)件重量增(zēng)加時,定位精度降低。因此,設計時不僅要減小運動部件本身的重量,而(ér)且(qiě)要考慮工作時抓重變化的影(yǐng)響。

企(qǐ)業選(xuǎn)擇(zé)伺服機械手的理(lǐ)由(yóu)。
工作時間長
一天24小時都可以連(lián)續運作,而人工必須要有休息(xī)時間。
可替(tì)代人工進行危險性作業
在某些領(lǐng)域,不少的工序是很有危險性的,伺服機械手運(yùn)轉(zhuǎn)的話就(jiù)消除了老板的這一顧慮。
成本低,半年能回本
一台伺服機械手大(dà)概(gài)在15萬左右,軸數不(bú)一樣,成本前期來說會是一筆不(bú)小的錢(qián),可是按時間,月份來算的話也就相當於員工大半年的工資。
不用發工資(zī),效(xiào)率高
當(dāng)然(rán),機器人是不用發工資的,而且(qiě)運作(zuò)效率非常之高,比起人(rén)工的出錯率要低很多。
減少工人手工技術的依(yī)賴性(xìng)
在中國,普工的占比很高,工人(rén)手工技術的依賴性也非常之大,社會需要(yào)進(jìn)步,必然製造業也要(yào)不斷的科技化,效率化,伺服機械手替代人工,也將減少工人手工技術的(de)依賴性。
為什麽高運伺服機械(xiè)手會難以普及?
機械設備性能的高低,往往會影響采用這機械設備企業整體效率的高低;性能高,生產的質量高(gāo),效率大,反(fǎn)之則(zé)效率小。麵對性能高的設備,可能會產生更(gèng)大的市場利(lì)潤,可也會麵(miàn)臨著無人購買的局麵,使它的價值真正的(de)難以發揮出來。像伺服機(jī)械手能生產出高質量的產品,創造更大的價(jià)值,可是也麵臨著少(shǎo)數人(rén)購買的局麵,為什麽會出現這樣的情況(kuàng)。
不要懷(huái)疑這是假信(xìn)息,但伺服機械手(shǒu)的銷售量少並不是空穴來風(fēng),是有事實依據的,證明它為什麽會有這麽低的銷售量。中國塑料加工(gōng)廠對機(jī)械手表現出越來越濃厚(hòu)的興趣,但是注塑機伺服機械手在國內塑機行業的普及率低於10%,仍然不如人意。首先(xiān)是因為成本高是阻礙加工企業使用伺服機械手的主要(yào)因素之一;機械手的售價大約等於使(shǐ)一台設備一(yī)天24小(xiǎo)時連(lián)續(xù)運轉所(suǒ)需(xū)工人的兩至三年(nián)的工資總和。價(jià)格太高,使有些企業難統以承受這樣的壓力,減(jiǎn)少它的使用。
雖然伺(sì)服機械手(shǒu)在(zài)注塑機行業的普(pǔ)及率比較低,但也不是並沒有企業(yè)采用它;也是存在采用它生產注(zhù)塑產品的,而(ér)且效果(guǒ)挺好。采用(yòng)機械手可以確保運轉周期的一貫性,提高品質,並且更加安全。而且(qiě)能創造更大價值,使產品更有競爭性。
伺服(fú)機械手的優點:
1、解決企業招工難、管(guǎn)人難的問題;
2、避免衝壓工人工傷事故(gù)發生,降低企(qǐ)業風險;
3、機械手可24小時不(bú)間斷工作,為您(nín)創造(zào)更大價值;
4、安裝簡單:立柱式結構,可連接齒輪衝(chōng)床、氣動衝床及各種油壓機;
5、全麵滿足衝床自動(dòng)上下料需求:可根據(jù)衝床高度、送料高度、下料高度自動適應,伸縮軸(zhóu)可根(gēn)據實際需要(yào)自由伸展,旋轉軸可進行自由角度的旋轉;
6、傻瓜式操(cāo)作:衝(chōng)壓自動化機械手采用示教模式規劃運動軌跡,簡單易用;
7、量身訂製解決方案:依(yī)客戶(hù)的個性化(huà)需求,量身訂製較好解(jiě)決方案,避免客戶錯誤的(de)設備投資(zī);
8、應用廣泛:噸位衝床、各種高度的機台均(jun1)可使用,從而(ér)實現設備自由組合,全方位、多角度(dù)實現各種複雜(zá)衝壓動作,如翻轉、打廢料、側掛或斜放(fàng)、堆料(liào)等。




