

蕪湖碼垛機(jī)械手做出(chū)來的產品質量怎樣?
文章出處:本站 人氣:9309 發表時間:2022-09-14 06:19:12
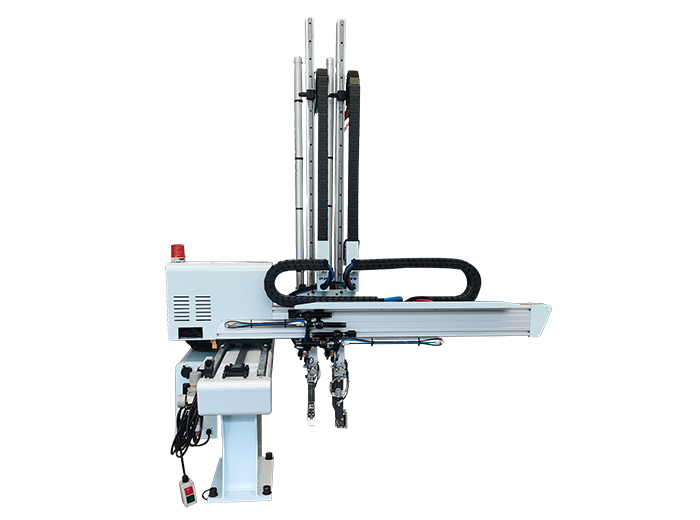
碼垛機械手(shǒu)的運用可以幫企業節省大量的(de)人力(lì)成本,提高產品的(de)品質及工作效率,是企業邁進智能製造較好(hǎo)的幫手。
碼垛機械(xiè)手的(de)功能及優點 :
1.上下軸伺服馬(mǎ)達驅(qū)動,成品(pǐn)臂上下軸由AC伺服馬達驅動,可快速的橫行(háng)動作,節省模內時間,增加(jiā)效率,並可在(zài)模外設置不同的置物高(gāo)度,定位精(jīng)度為 0.2MM,噴離型劑組可設定幾模噴,每次噴多久,噴頭可以裝在手臂或模具上。
2.引拔位置、行(háng)程(chéng)電動遙控調整,節省(shěng)調整時間增加操作的安(ān)全性。上下電動調整(zhěng)行程,上下(xià)行程電動遙控調整,節省調整時間增加操作的安全性。橫行軸數字控製,數字設定橫行行程,可多(duō)點及循放(fàng)成品,最多可放99點。用(yòng)於排列成品。
3.橫行伺服(fú)馬達驅動,橫行軸可(kě)選用AC伺服馬達驅動,並采用精密級行星減速機(jī)以齒輪齒條傳動,速度快定位準確;定位精度達0.1MM,可應用於需定位準確之(zhī)取出。
碼垛機械手的雙截式手臂采用高剛性線性滑(huá)軌及鋁合金結構梁,特殊設計的(de)皮帶倍速機(jī)構,可大符度的縮短上下手臂的結構高度,上下氣缸隻需一半的行程(chéng)即(jí)可達到全行程。除了(le)可增加上下行的速(sù)度及穩(wěn)定度,並且可(kě)配(pèi)合廠房高度低(dī)之場所。

碼垛機(jī)械手操作流程是怎樣的?
1、先接好氣管,讓機(jī)械手(shǒu)氣壓表的氣壓在4kg-8kg之間。
2 、打開機械(xiè)手電源開關,並在注塑機控製板上打開機械手功能鍵。
3 、注塑機開模完成後,先(xiān)手動放下機(jī)械手臂,並調節(jiē)好手臂下降的位置。在調試機械手的各行(háng)程位(wèi)置時,首先(xiān)模開到足夠寬的位置,再把機械手氣缸裏的氣放掉(diào),用手慢慢地托下主臂,再逐一進(jìn)行調試,以免碼垛機械手(shǒu)下(xià)降時損壞模具及治具。
4 、按“手動”鍵,即可進入(rù)手動操作畫麵,依(yī)所須動作,先按“選擇”鍵,再 按“動作”鍵,依次調節好各動作的延時時間(jiān),檢查安全報警裝(zhuāng)置,機(jī)械手取出異常時能否發生報警,開機之前(qián)必須調好檢測,以免壓模 。
5、按產品的要求設定或選擇所需(xū)要的程式合理(lǐ)進行取物(wù), 然(rán)後在注塑機(jī)自動狀態下,按“全自動”鍵(jiàn)即可進入自動生產。
6、如要(yào)修改動作程式:按“停(tíng)止”鍵和“修改”鍵,進(jìn)入程式修改畫麵。
7、技術(shù)人員可依(yī)據不(bú)同的模具,輸入動作程式“0-99”,確定後按(àn)“輸入”鍵 確(què)認,再按(àn)“停止”鍵,然後按“全自動”鍵進(jìn)入自動生產。
8、其它設定參照設備使用說(shuō)明書。

碼垛機械手如何進行更好的係統控製?
碼垛機(jī)械手的全部動作都(dōu)在操控係統的指揮下來進行的,特別是碼垛(duǒ)機械手和注塑機之間(jiān)的的和諧工作聯係(xì),更是要需要操控係(xì)統來完結。
1、必定要留神操控碼垛機械手的運轉速度,也即是說要讓(ràng)碼垛機械手能夠滿意注塑成型(xíng)最(zuì)短周期的需要,有要(yào)考慮會不會發生(shēng)慣性衝擊(jī)以及一些振蕩。
2、必(bì)定要理解操(cāo)控係統(tǒng)的費用以及實際工作需求(qiú)之前一係列(liè)的平(píng)衡聯係。
3、必定要確保(bǎo)碼垛機械手具有滿足的定位精度。
4、還有留心的必定即是碼(mǎ)垛機械手和注(zhù)塑機的動作合作和(hé)諧疑問,必定要確保碼垛機械手抓取成品脫離模具以後,注(zhù)塑機以及碼垛機械手能夠各自繼續進行動(dòng)作運轉,這樣來削減時刻的糟蹋。

碼垛機械手手臂的組成:
(1)運動元件。如油缸、氣缸、齒條、凸輪等是驅動手臂運動(dòng)的部件。
(2)導向(xiàng)裝置。是保證手(shǒu)臂的(de)正確方麵及承受由於工件的重量所產生的彎曲和扭轉的力(lì)矩。
(3)手臂。起著連接和承受外力的作用。手臂上的零部件,如油缸、導向杆、控製件等都(dōu)安裝在手臂上。
此(cǐ)外,根(gēn)據碼垛機械(xiè)手運動和工作的要求,如管路、冷卻裝置、行程定位裝置和自動檢(jiǎn)測裝(zhuāng)置等,一般也都裝在手臂上。所(suǒ)以手臂的結構、工作範圍、承載能力和動作精度都直接影響碼垛機械手的工作性能。
你知道碼垛機(jī)械手的關節(jiē)是靠什(shí)麽連接的?
不論是3軸還是(shì)6軸的碼垛機械手,采用的都是交流(liú)伺服電機,並且都(dōu)是帶刹車的。
編碼(mǎ)器一般都是絕對值的。不是絕對值的電機,每次停機後存在一個回零的問(wèn)題。
碼垛機械手都要用到減速器(qì)
早期進口的ABB的碼垛機械手大都用他們自己製造的齒輪機構減速。
6軸工業機器人的1、2、3軸(zhóu)用(yòng)的都(dōu)是RV減速機,屬於擺線針輪結構。4、5、6軸一般采(cǎi)用諧波減(jiǎn)速機。由於軸(zhóu)承是特製的,這種擺線(xiàn)針輪的RV減速機軸向尺寸很短。國內用的比(bǐ)較多的是日本人帝人公司的這(zhè)種減速機。軸向尺寸比較短的(de)伺服電機有日本的發那科,國內廣州數控也有專門為他們自己公司工業機器(qì)人配套的伺服電機,較他們傳統的伺服電機軸(zhóu)向尺寸短很多(duō)。
- 上一(yī)篇: 蘇州非標機械手應用領域(yù)有哪些?
- 下一(yī)篇: 昆山非標機械(xiè)手好處優點有哪些?




