

安徽機床機械手(shǒu)如何清理灰塵?
文章出處:本站 人氣:10792 發表時間:2022-05-26 06:25:15
機床機械手如何進行更好的係統(tǒng)控製?
機床機械手的全部動作都在操控係統的指揮下來進行的,特別是機床機械手和注塑機之間的(de)的和諧工作聯係,更是要需(xū)要操控(kòng)係統來完結。
1、必定要留神操控機床機械(xiè)手的運轉速度,也即是說要讓機床機械手能夠滿意注塑成型最短周期的需要,有要考慮會不會發生慣性衝擊以及一些振蕩。
2、必定要理解操控係統的費用以(yǐ)及實際工作需求(qiú)之前一係列的平衡聯係。
3、必定要確(què)保機床機械手(shǒu)具有滿足的定位精(jīng)度。
4、還有留心的必定即是(shì)機床機械手(shǒu)和注塑機(jī)的動作合作和諧疑問,必定要確保機床機械手(shǒu)抓取成(chéng)品脫離模具以後,注塑機以及機床機械手能(néng)夠各自繼續進(jìn)行動作(zuò)運轉,這樣來削減時刻的糟蹋。

機械手從動(dòng)力上來講有伺(sì)服的也有氣缸的,還有伺服氣缸混合的。從動作上來講有橫走式的也有反轉式的,高級點的也有6軸機械手(shǒu)。
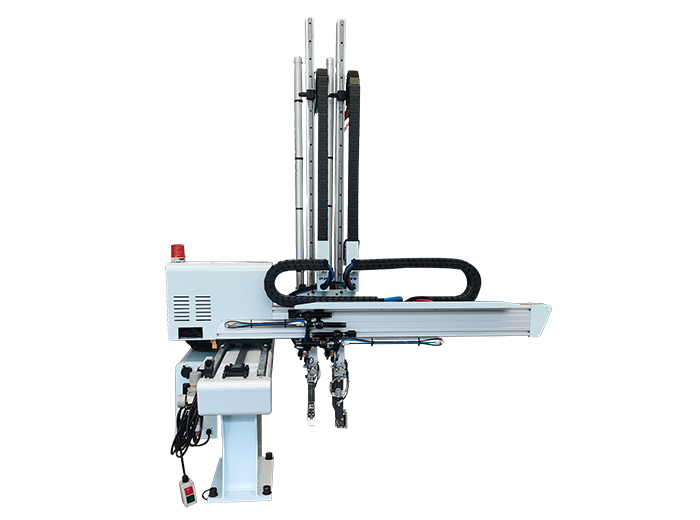
咱們就以常用的友信機床機械手為例進行簡單說明。機(jī)床機械手可(kě)以沿XYZ(即前後、左右、上下)方(fāng)向移動。手臂(bì)的末端可(kě)以安裝取出治具,取出治具上麵可以(yǐ)根據產品不同安裝取出產品用的吸盤或抱具,或夾取料頭用的氣動夾嘴。當模具開模後,機械手臂(bì)下降到模具內合(hé)適的位置吸住產品、夾住料頭,並將產品和料頭從模具上取出來,然後(hòu)機(jī)械手臂上(shàng)升到模(mó)具上麵,再移動到注塑機後麵(有時移動到(dào)前(qián)麵),夾嘴在料頭箱上方開放,讓料頭落下到料頭箱(xiāng)內。
產品隨(suí)注(zhù)塑機機械手繼續移動到合適位置後(hòu)手臂下降,手臂(bì)反轉90度,將產品放在傳送帶或整列機上。然後機械手(shǒu)臂回到模具上方等待取出下一模產品。大概就是這麽一(yī)個過程。因此需要根據產品要(yào)求(qiú)先設(shè)定好機械(xiè)手動作模式,並設定好機(jī)械手每一步動作需要到達的位置和(hé)速度,以及等待時間等。試運(yùn)行沒有問題後才可以全(quán)自(zì)動(dòng)運轉。
當然具體的調整需要一定的(de)熟練(liàn)過程和經驗積累。因此想用機(jī)械手的(de)話(huà)一定要先仔細閱(yuè)讀機械手操作說明書,按照(zhào)說明書的講解一步一步的調整(zhěng)。

機床機(jī)械手在設計的過程中,當確(què)定(dìng)運動速度機床機械手各動作(zuò)的最大行程確定之後,可根據生產需要的工作拍節分配每個動作的時間,進而(ér)確定(dìng)各(gè)動作(zuò)的運動(dòng)速度。液壓上料機床機(jī)械手要完成整個上料過程,需完成(chéng)夾緊工件、手臂升降、伸縮、回轉,平移等一係列的動作,這些動作都應該在(zài)工作拍節(jiē)規(guī)定的時間內完成,具體時(shí)間的分配取決於很多(duō)因素,根(gēn)據各種因素反複考慮,對(duì)分配的方案進行比較,才能確(què)定。機床機械手的總動作時間(jiān)應小於或(huò)等於工作拍節,如果兩個動作同時進行,要按時間長的計算,分配各(gè)動作時間應考慮以下要求:
一(yī).給定的運動時間應大於電氣、液壓元件的執(zhí)行時間;
二(èr).在工作拍節短、動作多的情況下,常使幾個動(dòng)作同時進行。為此驅(qū)動係統要采取相應的措施(shī),以保證動作的同(tóng)步。
三.伸縮運動的速度要大於回轉運動的(de)速(sù)度,因為回(huí)轉(zhuǎn)運動的慣性一般大於伸(shēn)縮(suō)運動(dòng)的慣性。在滿(mǎn)足工作拍節要求的(de)條件下,應盡量選取較(jiào)底的運(yùn)動速度。機床機械(xiè)手的運動速度與(yǔ)臂力、行程、驅動方式、緩衝方(fāng)式、定位方式都有很大關係,應根據具體情況(kuàng)加以確定。
機床機械手手臂的組成(chéng):
(1)運動元(yuán)件。如(rú)油缸、氣缸、齒條、凸輪等是驅動手臂運動的部件。
(2)導向裝置。是保證手臂的正確方麵及承受(shòu)由於工件(jiàn)的重量所產生的(de)彎曲和扭轉的力矩。
(3)手臂。起著連接和承受外力的作用。手(shǒu)臂上(shàng)的零部(bù)件(jiàn),如油缸、導向杆、控製件等都安裝在(zài)手(shǒu)臂上。
此外,根據(jù)機床機械手運動和工作的要求,如管路、冷(lěng)卻裝(zhuāng)置、行程定位裝置和自動檢測(cè)裝置等(děng),一般也都裝在手臂上。所以手(shǒu)臂的結構、工作範圍、承載能力和動作精度都直接影響機床機(jī)械手的工作性能。

機床機械手的優點:
1、解決企業招工難、管人難的問題;
2、避免衝壓工人(rén)工(gōng)傷事故發生,降低(dī)企業風險;
3、機械手可24小時不間斷(duàn)工作,為您創造更大(dà)價值;
4、安(ān)裝簡(jiǎn)單:立柱式結(jié)構,可(kě)連接齒輪衝床、氣動衝床及各種油壓機;
5、全麵滿足衝床(chuáng)自動上下料需求:可根(gēn)據衝床高(gāo)度、送料(liào)高度、下料高(gāo)度(dù)自動適應,伸縮軸可根據實際(jì)需(xū)要自由伸展(zhǎn),旋轉軸可進行自由角度的旋(xuán)轉;
6、傻瓜式操作:衝壓自動化機械手采用示教模(mó)式規(guī)劃(huá)運動軌跡,簡單易(yì)用;
7、量身(shēn)訂製解決方案:依客戶的個性化需求,量(liàng)身訂(dìng)製(zhì)較好解決方(fāng)案,避免客戶錯誤的設備投(tóu)資;
8、應用廣泛:噸位衝床、各(gè)種高度的機(jī)台均可使用,從而實現設備自由組合,全方位、多角度實現各種(zhǒng)複雜衝壓動作(zuò),如翻轉、打廢料、側(cè)掛(guà)或斜放、堆料等。
- 上(shàng)一篇: 南京伺服機(jī)械手應用(yòng)領域有哪些?
- 下一篇: 蕪湖衝(chōng)壓機械手做出來的(de)產品質量怎樣?




